라즈베리 파이와 파이썬을 사용해 가속도/자이로 센서(MPU6500)를 쉽게 제어하는 방법을 초보자도 이해할 수 있도록 설명합니다. 시작부터 동작까지, 모든 과정을 설명하여 누구나 라즈베리파이를 이용한 가속도/자이로 센서(MPU6500) 제어를 마스터할 수 있습니다.
목차
초보자를 위한 파이썬 가속도/자이로 센서(MPU6500) 활용법 완전 정복

라즈베리파이와 가속도/자이로 센서(MPU6500)에 대해 알아봅시다. MPU6500은 3축 가속도계와 3축 자이로스코프가 결합된 MEMS 센서로, 로봇 공학, 드론, 스마트폰 등 다양한 분야에서 사용됩니다. 이 센서는 I2C 인터페이스를 통해 라즈베리파이와 쉽게 통신할 수 있으며, 내부의 디지털 모션 프로세서(DMP)를 통해 정밀한 센서 데이터를 제공합니다. 구입은 아마존, 이베이 등에서 가능하며, $5-$15 사이의 가격입니다. 하드웨어 연결은 3.3V 또는 5V 전원, GND, SDA, SCL 핀을 사용합니다. Python을 이용한 소프트웨어 코딩으로 센서 데이터를 읽을 수 있으며, 이를 통해 다양한 프로젝트에 활용할 수 있습니다. 성공적인 프로젝트를 기원합니다!
(1) 가속도/자이로 센서(MPU6500) 란?
가속도/자이로 센서(MPU6500)는 현대 기술에서 매우 중요한 역할을 하는 고급 MEMS(Micro-Electro-Mechanical Systems) 센서입니다. 이 센서는 3축 가속도계와 3축 자이로스코프가 결합되어 있어, 물체의 선형 가속도와 각속도를 동시에 측정할 수 있습니다. 이는 센서 하나로 물체의 움직임과 회전을 모두 감지할 수 있다는 의미로, 다양한 응용 분야에서 큰 유용성을 제공합니다.

MPU6500은 InvenSense에서 제조한 제품으로, 높은 정확도와 안정성을 자랑합니다. 3축 가속도계는 X, Y, Z 축에 대한 선형 가속도를 측정하여 물체가 공간에서 어떻게 이동하는지를 알려줍니다. 3축 자이로스코프는 마찬가지로 X, Y, Z 축에 대한 각속도를 측정하여 물체가 어떻게 회전하는지를 파악합니다. 이 두 가지 정보를 결합하면, 물체의 복잡한 3차원 움직임을 정밀하게 추적할 수 있습니다. 이러한 기능은 로봇 공학, 드론, 스마트폰, 웨어러블 기기 등 다양한 분야에서 매우 유용합니다. 예를 들어, 드론에서는 비행 안정성을 유지하기 위해 가속도와 자이로 데이터를 실시간으로 분석해야 합니다.
스마트폰에서는 사용자의 움직임을 감지하여 화면 회전을 자동으로 조정하거나, 건강 추적 애플리케이션에서 걸음 수를 계산하는 데 사용됩니다.
MPU6500은 I2C(Inter-Integrated Circuit) 인터페이스를 통해 통신합니다. 이는 두 개의 데이터 라인(SDA, SCL)만으로 여러 장치와 쉽게 통신할 수 있는 간편한 통신 방식입니다. 라즈베리파이와 같은 마이크로컨트롤러와 쉽게 연결할 수 있으며, 다양한 센서 데이터를 빠르고 효율적으로 수집할 수 있습니다. 또한, MPU6500은 낮은 전력 소비로 설계되어 있어 배터리로 구동되는 프로젝트에 적합합니다. 작은 크기와 경량으로 인해 제한된 공간에서도 쉽게 설치할 수 있습니다.
이 모든 특성들이 결합되어, MPU6500은 매우 유연하고 강력한 센서 솔루션으로 자리매김하고 있습니다. MPU6500은 실내 및 실외에서 다양한 환경 조건에서도 안정적으로 작동합니다. 이는 내구성 높은 설계와 함께 내부 신호 처리를 담당하는 DMP(Digital Motion Processor)의 존재 덕분입니다. DMP는 복잡한 신호 처리 작업을 센서 내부에서 직접 수행하여, 외부 마이크로컨트롤러의 부하를 줄이고 보다 정확한 데이터를 제공합니다. 이로 인해, MPU6500은 다양한 실시간 애플리케이션에서 높은 성능을 발휘할 수 있습니다.
(2) 가속도/자이로 센서(MPU6500) 동작 원리
MPU6500의 동작 원리를 이해하기 위해서는 가속도계와 자이로스코프의 기본 작동 방식을 먼저 알아야 합니다. 가속도계는 물체의 가속도를 측정하는 장치입니다. 이는 중력 가속도를 포함하여, 물체가 특정 방향으로 얼마나 빠르게 이동하는지를 감지합니다. 3축 가속도계는 X, Y, Z 세 축에 대한 가속도를 각각 측정하여 3차원 공간에서의 이동을 추적할 수 있습니다.

가속도계는 내부에 있는 작은 질량체가 움직일 때 발생하는 전기 신호를 측정하여 가속도를 계산합니다. 이 질량체는 물체가 이동할 때 관성에 의해 움직이며, 이 움직임을 전기 신호로 변환하여 가속도를 측정합니다. 이러한 원리를 통해, 가속도계는 사용자가 기기를 움직이거나 기기가 떨어지는 것을 감지할 수 있습니다.
반면에 자이로스코프는 물체의 각속도를 측정합니다. 각속도는 물체가 회전하는 속도를 의미하며, 자이로스코프는 이러한 회전 운동을 감지합니다. 3축 자이로스코프는 X, Y, Z 세 축에 대한 각속도를 각각 측정하여 물체가 어떻게 회전하는지를 파악할 수 있습니다. 자이로스코프는 내부에 있는 진동하는 구조물을 사용하여 회전 운동을 감지합니다. 이 구조물은 코리올리 힘에 의해 회전할 때 미세하게 움직이며, 이 움직임을 전기 신호로 변환하여 각속도를 측정합니다. 이를 통해, 자이로스코프는 물체의 회전 운동을 정확하게 감지할 수 있습니다.
MPU6500은 이 두 가지 센서를 하나의 칩에 통합하여, 6축의 움직임 데이터를 동시에 제공할 수 있습니다. 이 센서는 I2C 인터페이스를 통해 데이터를 전송하며, 라즈베리파이와 같은 마이크로컨트롤러와 쉽게 통신할 수 있습니다. I2C 인터페이스는 두 개의 데이터 라인(SDA, SCL)만으로 여러 장치와 통신할 수 있는 간편한 방식으로, 소형 기기에서 많이 사용됩니다.
또한, MPU6500은 내부에 신호 처리를 위한 DMP(Digital Motion Processor)를 탑재하고 있습니다. DMP는 가속도계와 자이로스코프에서 수집한 데이터를 실시간으로 처리하여, 외부 마이크로컨트롤러의 부하를 줄이고 보다 정확한 데이터를 제공합니다. DMP는 센서 퓨전 알고리즘을 사용하여, 가속도와 자이로 데이터를 결합하여 보다 정확한 움직임 정보를 생성합니다.
MPU6500은 이와 같은 고급 신호 처리 기술을 통해, 다양한 실시간 애플리케이션에서 높은 성능을 발휘할 수 있습니다. 예를 들어, 로봇 공학에서는 로봇의 위치와 자세를 실시간으로 추적하여 안정적인 움직임을 유지할 수 있습니다. 드론에서는 비행 중에 드론의 자세를 지속적으로 모니터링하여 안정적인 비행을 유지할 수 있습니다.
(3) 가속도/자이로 센서(MPU6500) 구입하기
[가속도/자이로 센서(MPU6500)]는 알리익스프레스, 네이버 쇼핑몰, 아마존 등에서 센서를 구입할 수 있습니다

MPU6500 센서를 구입하는 것은 비교적 간단합니다. 이 센서는 전자 부품 쇼핑몰, 온라인 마켓플레이스 및 전자 제품 전문 상점에서 쉽게 찾을 수 있습니다.
여기서는 MPU6500을 구입하는 몇 가지 방법과 주의사항에 대해 자세히 알아보겠습니다.
- 첫 번째로, 온라인 전자 부품 쇼핑몰을 이용하는 방법이 있습니다. Digi-Key, Mouser, SparkFun, Adafruit 등과 같은 사이트에서는 다양한 센서와 전자 부품을 구입할 수 있습니다. 이들 사이트는 정품을 판매하며, 기술 지원도 받을 수 있습니다. MPU6500을 검색하면 여러 가지 옵션이 나오며, 가격, 제조사, 제품 설명 등을 비교하여 선택할 수 있습니다.
- 두 번째로, 대형 온라인 마켓플레이스를 이용하는 방법이 있습니다. 아마존, 이베이와 같은 사이트에서도 MPU6500을 쉽게 찾을 수 있습니다.
이들 사이트에서는 다양한 판매자가 제품을 판매하고 있어, 가격 비교와 사용자 리뷰를 통해 제품을 선택할 수 있습니다.
다만, 이베이와 같은 사이트에서는 가짜 제품이 판매될 가능성도 있으므로, 신뢰할 수 있는 판매자로부터 구매하는 것이 중요합니다. 세 번째로, 지역 전자 부품 상점을 이용하는 방법도 있습니다. 일부 지역에서는 전자 부품을 전문적으로 판매하는 상점이 있으며, 여기서 직접 제품을 보고 구입할 수 있습니다. 이러한 상점에서는 직접 상점 직원의 도움을 받을 수 있어, 초보자에게 특히 유용할 수 있습니다.
구매할 때 주의해야 할 몇 가지 사항이 있습니다. 첫째, 제품의 정품 여부를 확인하는 것이 중요합니다. 가짜 제품은 성능이 떨어지거나 제대로 작동하지 않을 수 있습니다. 따라서 신뢰할 수 있는 판매자로부터 구매하는 것이 좋습니다. 둘째, 필요한 부속품이 포함되어 있는지 확인해야 합니다. 예를 들어, 일부 판매자는 센서 모듈만 판매하고, 배선이나 핀 헤더는 포함하지 않는 경우도 있습니다. 필요한 모든 부속품이 포함되어 있는지 확인하는 것이 좋습니다.
또한, 제품 설명을 꼼꼼히 읽고, 필요한 기술 사양을 확인해야 합니다. 예를 들어, I2C 주소가 표준 값인 0x68인지, 혹은 다른 값으로 설정되어 있는지 확인하는 것이 중요합니다. 일부 제품은 설정이 다를 수 있어, 이를 미리 확인하지 않으면 나중에 연결이나 설정 시 문제가 발생할 수 있습니다.
(4) 가속도/자이로 센서(MPU6500) 하드웨어 연결
MPU6500을 라즈베리파이에 연결하는 과정은 매우 간단하지만, 정확한 연결을 위해서는 몇 가지 단계를 신중히 따라야 합니다. 이 섹션에서는 MPU6500을 라즈베리파이에 연결하는 구체적인 방법을 자세히 설명하겠습니다.
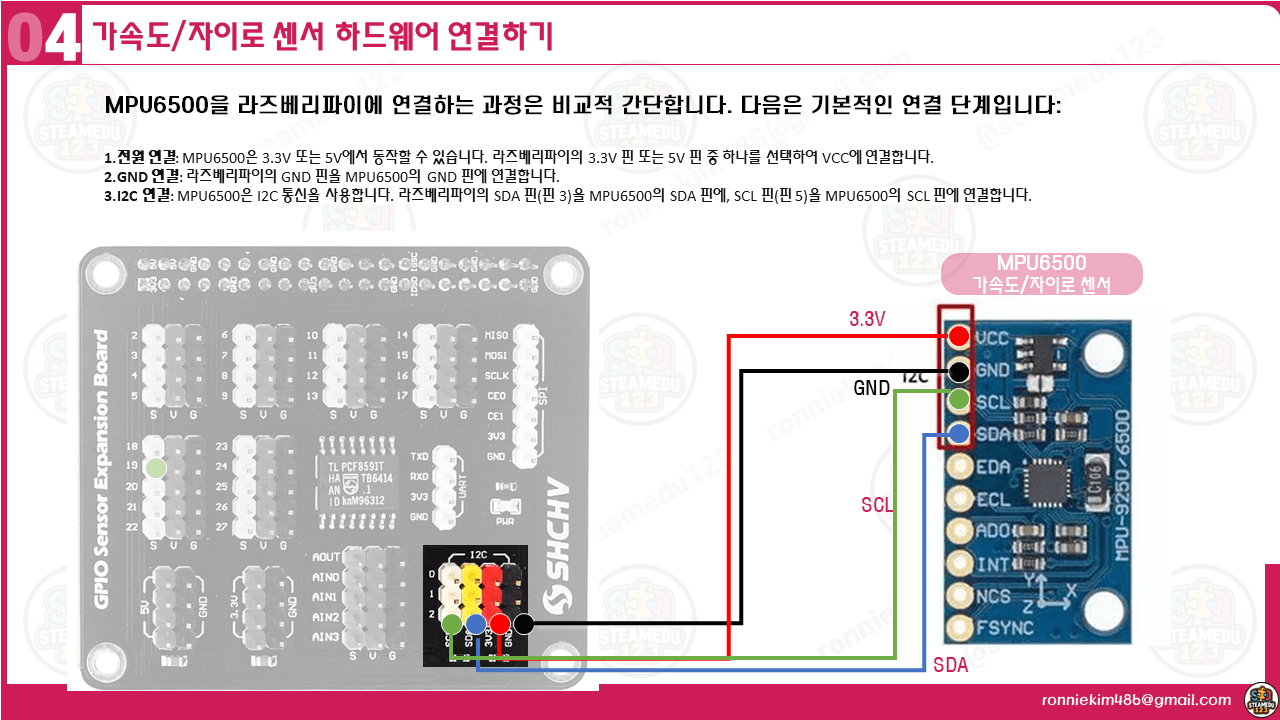
- 전원 연결: 먼저 MPU6500에 전원을 공급해야 합니다.MPU6500은 3.3V와 5V 전원 공급을 모두 지원합니다. 라즈베리파이의 3.3V 핀(핀 1 또는 17)을 사용하여 MPU6500의 VCC 핀에 연결할 수 있습니다. 또한, GND 핀(핀 6, 9, 14, 20, 25, 30, 34, 39) 중 하나를 선택하여 MPU6500의 GND 핀에 연결합니다. 이를 통해 센서에 필요한 전원이 공급됩니다.
- I2C 연결: MPU6500은 I2C 인터페이스를 통해 라즈베리파이와 통신합니다. I2C 인터페이스는 두 개의 주요 핀, 즉 데이터 라인(SDA)과 클럭 라인(SCL)을 사용합니다. 라즈베리파이의 SDA 핀(핀 3, GPIO 2)을 MPU6500의 SDA 핀에, SCL 핀(핀 5, GPIO 3)을 MPU6500의 SCL 핀에 연결합니다. 이렇게 연결하면 라즈베리파이와 MPU6500 간의 데이터 통신이 가능해집니다.
- I2C 인터페이스 활성화: 라즈베리파이에서 I2C 인터페이스를 사용하기 위해서는 I2C 기능을 활성화해야 합니다. 이를 위해 터미널에서 sudo raspi-config 명령어를 입력하여 설정 메뉴를 엽니다. 여기서 Interfacing Options를 선택하고, I2C를 선택하여 활성화합니다. 그런 다음, 라즈베리파이를 재부팅하여 설정을 적용합니다.
- 필요한 라이브러리 설치: 라즈베리파이에서 I2C 통신을 사용하기 위해 필요한 Python 라이브러리를 설치해야 합니다. 터미널에서 sudo apt-get install python-smbus와 sudo apt-get install i2c-tools 명령어를 입력하여 필요한 라이브러리를 설치합니다. 이 라이브러리는 라즈베리파이와 I2C 장치 간의 통신을 가능하게 합니다.
- 장치 확인: I2C 연결이 제대로 되었는지 확인하기 위해 i2cdetect -y 1 명령어를 터미널에서 실행합니다. 이 명령어는 연결된 I2C 장치의 주소를 스캔하여 표시합니다. MPU6500이 제대로 연결되었다면, 기본 주소인 0x68이 표시될 것입니다. 이 단계는 하드웨어 연결이 올바르게 되었는지 확인하는 중요한 과정입니다.
- 추가 설정: 필요한 경우, MPU6500의 I2C 주소를 변경할 수 있습니다. 일부 프로젝트에서는 동일한 I2C 버스에 여러 개의 MPU6500 센서를 사용할 수 있습니다. 이 경우, 주소 충돌을 피하기 위해 하나 이상의 센서의 주소를 변경해야 할 수 있습니다. 주소 변경 방법은 데이터 시트를 참조하여 적절히 설정합니다.
이러한 단계를 통해, MPU6500을 라즈베리파이에 성공적으로 연결할 수 있습니다. 연결 후에는 소프트웨어적으로 센서를 제어하여 데이터를 읽어올 준비가 된 것입니다. 올바르게 연결된 하드웨어는 안정적인 데이터 수집을 가능하게 하며, 이후의 코딩 작업을 원활하게 진행할 수 있게 합니다.
(5) 가속도/자이로 센서(MPU6500) SW 파이썬 코딩
라즈베리파이에서 가속도/자이로 센서(MPU6500)를 제어하기 위한 소프트웨어 준비 과정은 다음과 같은 단계로 이루어집니다:
[가상 환경 설정]
먼저, 파이썬의 가상 환경을 설정하여 다른 프로젝트와의 종속성 충돌을 방지합니다. 가상 환경은 특정 프로젝트에 필요한 패키지를 격리하여 관리할 수 있게 해줍니다.
- python3 -m venv myenv: 파이썬 3을 사용해 'myenv'라는 이름의 가상 환경을 생성합니다.
- source myenv/bin/activate: 생성한 가상 환경을 활성화합니다. 이렇게 하면 이후의 모든 파이썬 및 pip 명령은 이 가상 환경 내에서 실행됩니다.
[ 필요한 라이브러리 및 도구 설치]
센서를 제어하기 위한 라이브러리와 필수 도구를 설치합니다.
sudo apt-get update
sudo apt-get install -y python3-smbus i2c-tools
pip3 install smbus2
[코드 작성 및 실행]
센서 데이터를 읽기 위한 파이썬 스크립트를 작성하고 실행합니다.
- mpu6500.py 파일 생성: 센서 데이터를 읽고 처리하는 파이썬 스크립트 파일을 생성합니다.
- 코드 복사: 미리 준비한 코드 또는 예제 코드를 mpu6500 .py 파일에 복사합니다.이 코드는 mpu6500 센서로부터 온도와 습도 데이터를 읽어 출력하도록 구성됩니다.
- 실행: 스크립트를 실행하여 센서로부터 데이터를 읽고 결과를 확인합니다. 실행 명령은 python3 mpu6500 .py가 됩니다.
[코딩하기]
파이썬 코드는 다음과 같습니다.
'''
라즈베리파이와 MPU6500을 인터페이스하여 자이로 및 가속도계를 읽는 코드
'''
from smbus2 import SMBus
from time import sleep
# MPU6500 레지스터와 주소
PWR_MGMT_1 = 0x6B
SMPLRT_DIV = 0x19
CONFIG = 0x1A
GYRO_CONFIG = 0x1B
INT_ENABLE = 0x38
ACCEL_XOUT_H = 0x3B
ACCEL_YOUT_H = 0x3D
ACCEL_ZOUT_H = 0x3F
GYRO_XOUT_H = 0x43
GYRO_YOUT_H = 0x45
GYRO_ZOUT_H = 0x47
def MPU_Init():
# 샘플 레이트 레지스터에 쓰기
bus.write_byte_data(Device_Address, SMPLRT_DIV, 7)
# 전원 관리 레지스터에 쓰기
bus.write_byte_data(Device_Address, PWR_MGMT_1, 1)
# 구성 레지스터에 쓰기
bus.write_byte_data(Device_Address, CONFIG, 0)
# 자이로 구성 레지스터에 쓰기
bus.write_byte_data(Device_Address, GYRO_CONFIG, 24)
# 인터럽트 활성화 레지스터에 쓰기
bus.write_byte_data(Device_Address, INT_ENABLE, 1)
def read_raw_data(addr):
# 가속도계와 자이로 값은 16비트
high = bus.read_byte_data(Device_Address, addr)
low = bus.read_byte_data(Device_Address, addr + 1)
# 상위 및 하위 값을 결합
value = (high << 8) | low
# mpu6500에서 부호 있는 값 얻기
if value > 32768:
value -= 65536
return value
def main():
global bus, Device_Address
bus = SMBus(1) # 구형 보드의 경우 bus = SMBus(0)
Device_Address = 0x68 # MPU6500 장치 주소
MPU_Init()
print("자이로스코프와 가속도계의 데이터 읽기")
try:
while True:
# 가속도계 원시 값 읽기
acc_x = read_raw_data(ACCEL_XOUT_H)
acc_y = read_raw_data(ACCEL_YOUT_H)
acc_z = read_raw_data(ACCEL_ZOUT_H)
# 자이로스코프 원시 값 읽기
gyro_x = read_raw_data(GYRO_XOUT_H)
gyro_y = read_raw_data(GYRO_YOUT_H)
gyro_z = read_raw_data(GYRO_ZOUT_H)
# 감도 스케일 팩터에 따른 전체 스케일 범위 +/- 250도/C
Ax = acc_x / 16384.0
Ay = acc_y / 16384.0
Az = acc_z / 16384.0
Gx = gyro_x / 131.0
Gy = gyro_y / 131.0
Gz = gyro_z / 131.0
print(f"Gx={Gx:.2f}°/s\tGy={Gy:.2f}°/s\tGz={Gz:.2f}°/s\tAx={Ax:.2f} g\tAy={Ay:.2f} g\tAz={Az:.2f} g")
sleep(1)
except KeyboardInterrupt:
print("\n프로그램이 사용자에 의해 중단되었습니다.")
if __name__ == "__main__":
main()
[코드설명]
| 섹션 | 설명 |
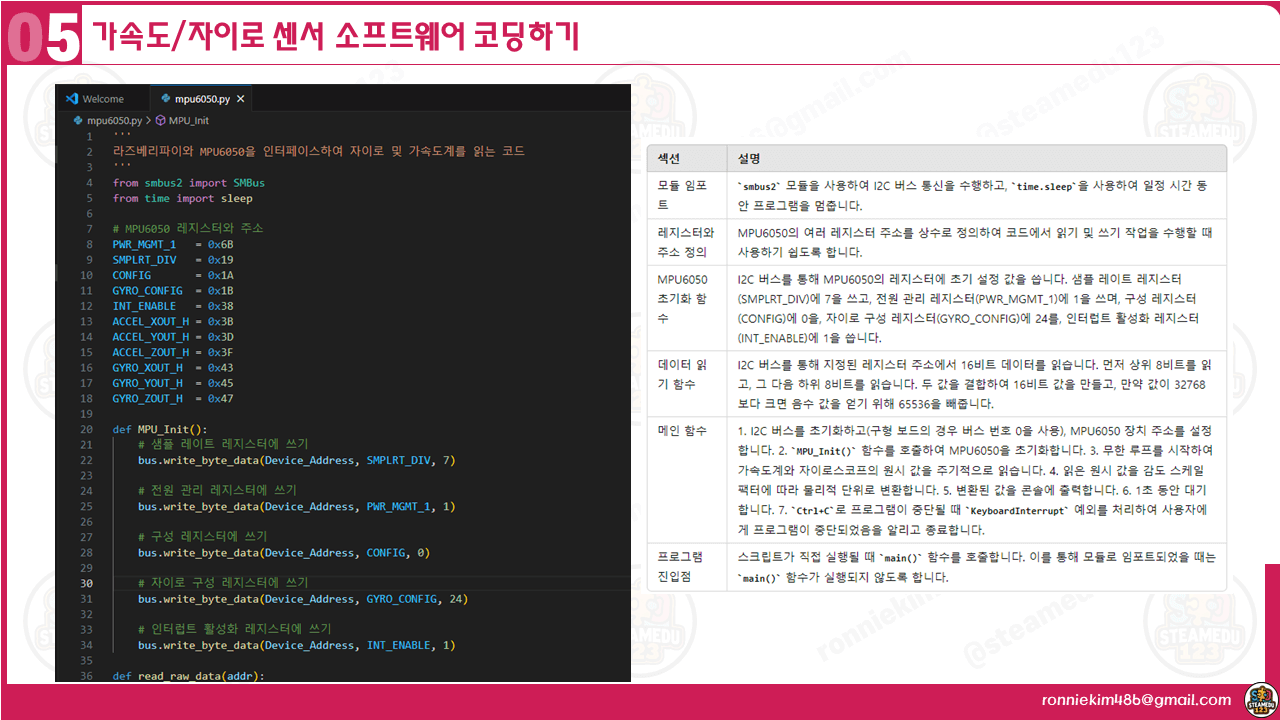
| 모듈 임포트 | smbus2 모듈을 사용하여 I2C 버스 통신을 수행하고, time.sleep을 사용하여 일정 시간 동안 프로그램을 멈춥니다. |
| 레지스터와 주소 정의 | MPU6500의 여러 레지스터 주소를 상수로 정의하여 코드에서 읽기 및 쓰기 작업을 수행할 때 사용하기 쉽도록 합니다. |
| MPU6500 초기화 함수 | I2C 버스를 통해 MPU6500의 레지스터에 초기 설정 값을 씁니다. 샘플 레이트 레지스터(SMPLRT_DIV)에 7을 쓰고, 전원 관리 레지스터(PWR_MGMT_1)에 1을 쓰며, 구성 레지스터(CONFIG)에 0을, 자이로 구성 레지스터(GYRO_CONFIG)에 24를, 인터럽트 활성화 레지스터(INT_ENABLE)에 1을 씁니다. |
| 데이터 읽기 함수 | I2C 버스를 통해 지정된 레지스터 주소에서 16비트 데이터를 읽습니다. 먼저 상위 8비트를 읽고, 그 다음 하위 8비트를 읽습니다. 두 값을 결합하여 16비트 값을 만들고, 만약 값이 32768보다 크면 음수 값을 얻기 위해 65536을 빼줍니다. |
| 메인 함수 | 1. I2C 버스를 초기화하고(구형 보드의 경우 버스 번호 0을 사용), MPU6500 장치 주소를 설정합니다. 2. MPU_Init() 함수를 호출하여 MPU6500을 초기화합니다. 3. 무한 루프를 시작하여 가속도계와 자이로스코프의 원시 값을 주기적으로 읽습니다. 4. 읽은 원시 값을 감도 스케일 팩터에 따라 물리적 단위로 변환합니다. 5. 변환된 값을 콘솔에 출력합니다. 6. 1초 동안 대기합니다. 7. Ctrl+C로 프로그램이 중단될 때 KeyboardInterrupt 예외를 처리하여 사용자에게 프로그램이 중단되었음을 알리고 종료합니다. |
| 프로그램 진입점 | 스크립트가 직접 실행될 때 main() 함수를 호출합니다. 이를 통해 모듈로 임포트되었을 때는 main() 함수가 실행되지 않도록 합니다. |
(6) 가속도/자이로 센서(MPU6500) 동작확인
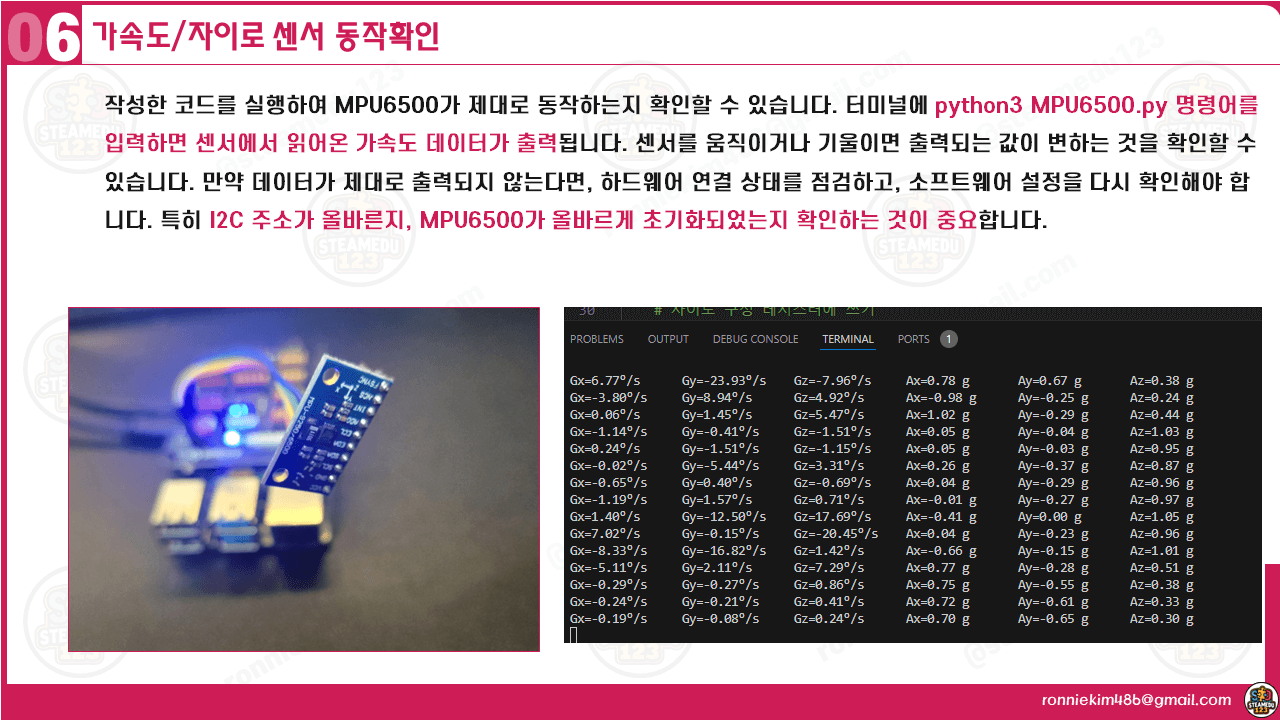
하드웨어 설치와 코드 작성이 완료된 후에는 실제로 센서가 정상적으로 작동하는지 확인해야 합니다.
소프트웨어 코딩이 완료되면, 이제 센서가 올바르게 동작하는지 확인해야 합니다. 위 코드가 라즈베리파이에서 실행되면, 터미널에 가속도와 자이로 값이 출력됩니다. 값을 확인하면서 센서를 움직여보세요. 각 축에 대한 값이 변화하는 것을 확인할 수 있습니다. 이를 통해 센서가 올바르게 작동하는지, 그리고 데이터가 정확하게 수집되는지 확인할 수 있습니다.
(7) 마무리
이렇게 가속도/자이로 센서(MPU6500)를 라즈베리파이와 연결하여 환경 데이터를 모니터링하는 프로젝트를 완성할 수 있습니다.
이번 블로그 글에서는 가속도/자이로 센서(MPU6500)를 라즈베리파이와 함께 사용하는 방법에 대해 자세히 알아보았습니다. 센서의 기본 원리부터 시작하여, 하드웨어 연결, 소프트웨어 코딩, 동작 확인까지 모든 단계를 체계적으로 설명했습니다. 이제 여러분은 MPU6500을 이용하여 다양한 프로젝트를 시도할 준비가 되었습니다. MPU6500은 3축 가속도계와 3축 자이로스코프를 결합한 고급 MEMS 센서로, 물체의 가속도와 회전 속도를 동시에 측정할 수 있습니다. 이는 로봇 공학, 드론, 스마트폰, 웨어러블 기기 등 다양한 분야에서 활용될 수 있습니다.
라즈베리파이와 함께 사용하면, 더욱 다양한 인터랙티브 프로젝트와 센서 기반 애플리케이션을 개발할 수 있습니다. 센서의 동작 원리를 이해하고, 하드웨어적으로 올바르게 연결한 후, 소프트웨어적으로 제어하여 데이터를 읽어오는 과정은 매우 중요한 단계입니다.
이를 통해 센서가 올바르게 작동하는지 확인하고, 수집된 데이터를 기반으로 다양한 분석과 응용 프로그램을 개발할 수 있습니다. 특히, 데이터 시각화와 캘리브레이션을 통해 센서 데이터를 보다 정확하게 이해하고 활용할 수 있습니다. 이는 프로젝트의 정확도와 신뢰성을 높이는 중요한 과정입니다. 예외 처리를 통해 프로그램의 안정성을 높이고, 다양한 상황에서도 원활하게 동작할 수 있도록 준비하는 것도 필수적입니다.
이제 여러분도 라즈베리파이와 MPU6500을 사용하여 다양한 프로젝트를 시도해 보세요. 예를 들어, 로봇의 움직임을 감지하여 자율 주행 로봇을 개발하거나, 드론의 비행 안정성을 유지하는 시스템을 구축할 수 있습니다. 또한, 스마트폰이나 웨어러블 기기에서 사용자의 움직임을 추적하여 건강 데이터를 분석하는 애플리케이션을 만들 수도 있습니다.
성공적인 프로젝트를 위해서는 지속적인 학습과 실습이 필요합니다. 새로운 기술과 도구를 학습하고, 이를 실제 프로젝트에 적용하여 경험을 쌓아가세요. 라즈베리파이와 MPU6500을 활용한 다양한 프로젝트를 통해 기술력을 향상시키고, 창의적인 아이디어를 실현해 나갈 수 있을 것입니다.
마지막으로, 프로젝트 진행 중에 발생하는 문제나 궁금한 사항이 있다면, 다양한 온라인 커뮤니티와 자료를 참고하여 해결할 수 있습니다. 라즈베리파이와 MPU6500에 대한 많은 자료가 인터넷에 존재하며, 이를 활용하여 더욱 깊이 있는 학습을 할 수 있습니다.
이제 여러분도 라즈베리파이와 MPU6500을 활용하여 다양한 프로젝트를 시작해 보세요. 창의적인 아이디어를 실현하고, 기술력을 향상시키는 과정에서 많은 성취감을 느낄 수 있을 것입니다. 성공적인 프로젝트를 기원합니다!
'모두의 라즈베리파이' 카테고리의 다른 글
| [라즈베리파이][센서][#13] 초보자를 위한 파이썬 [ RFID 리더(MFRC-522)] 활용법 완전 정복 (0) | 2024.06.03 |
|---|---|
| [라즈베리파이][센서][#11] 초보자를 위한 파이썬 [온습도센서(DHT22)] 활용법 완전 정복 (0) | 2024.05.24 |
| [라즈베리파이][센서][#10] 초보자를 위한 파이썬 [조이스틱(KY-023)] 활용법 완전 정복 (1) | 2024.05.21 |
| [라즈베리파이][LCD][#09] 초보자를 위한 파이썬 8x8 LED Matrix 활용법 완전 정복(MAX7219) (0) | 2024.05.06 |
| [라즈베리파이][LCD][#08] 초보자를 위한 파이썬 7 세그먼트(TM1637) 활용법 완전 정복 (0) | 2024.04.27 |





댓글